Unitree R1-A-D
Unitree R1-A-D from Unitree Robotics
Beschreibung
Unitree R1-A-D
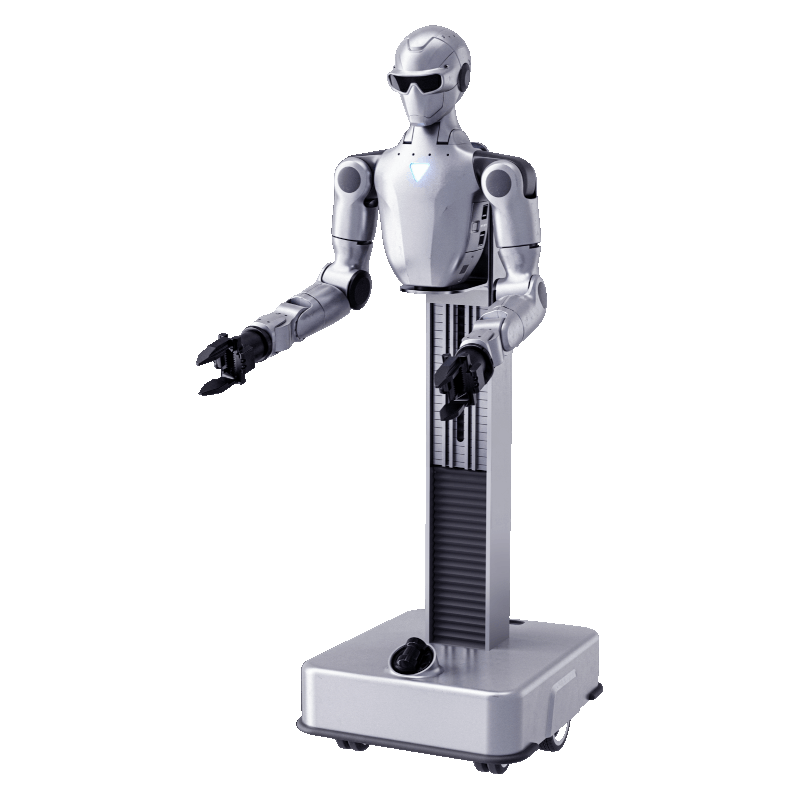
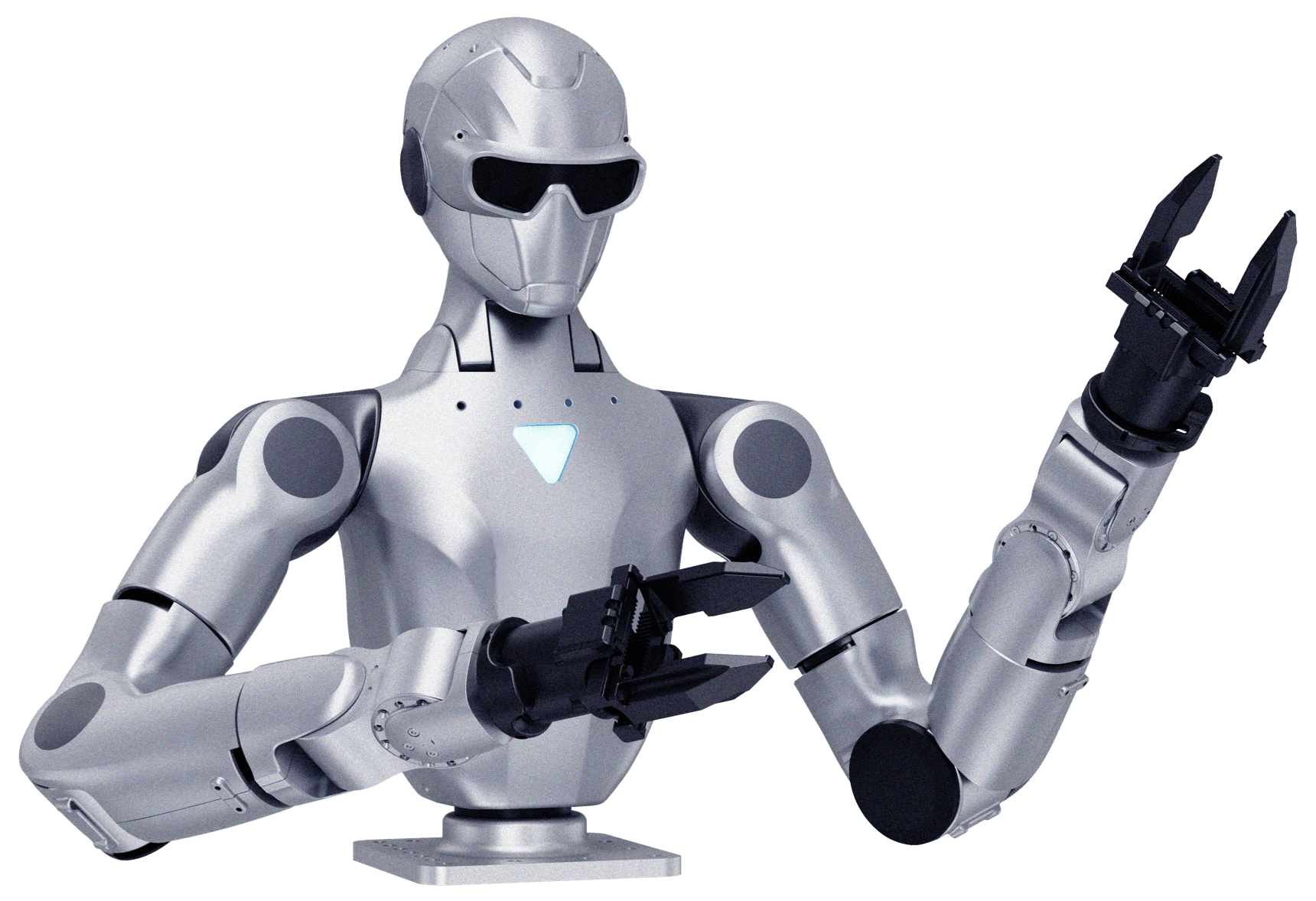
Unitree Dual-Arm Humanoid Robot
Ultra-fast deployment, multi-scenario application
(delivery time: 6 months)
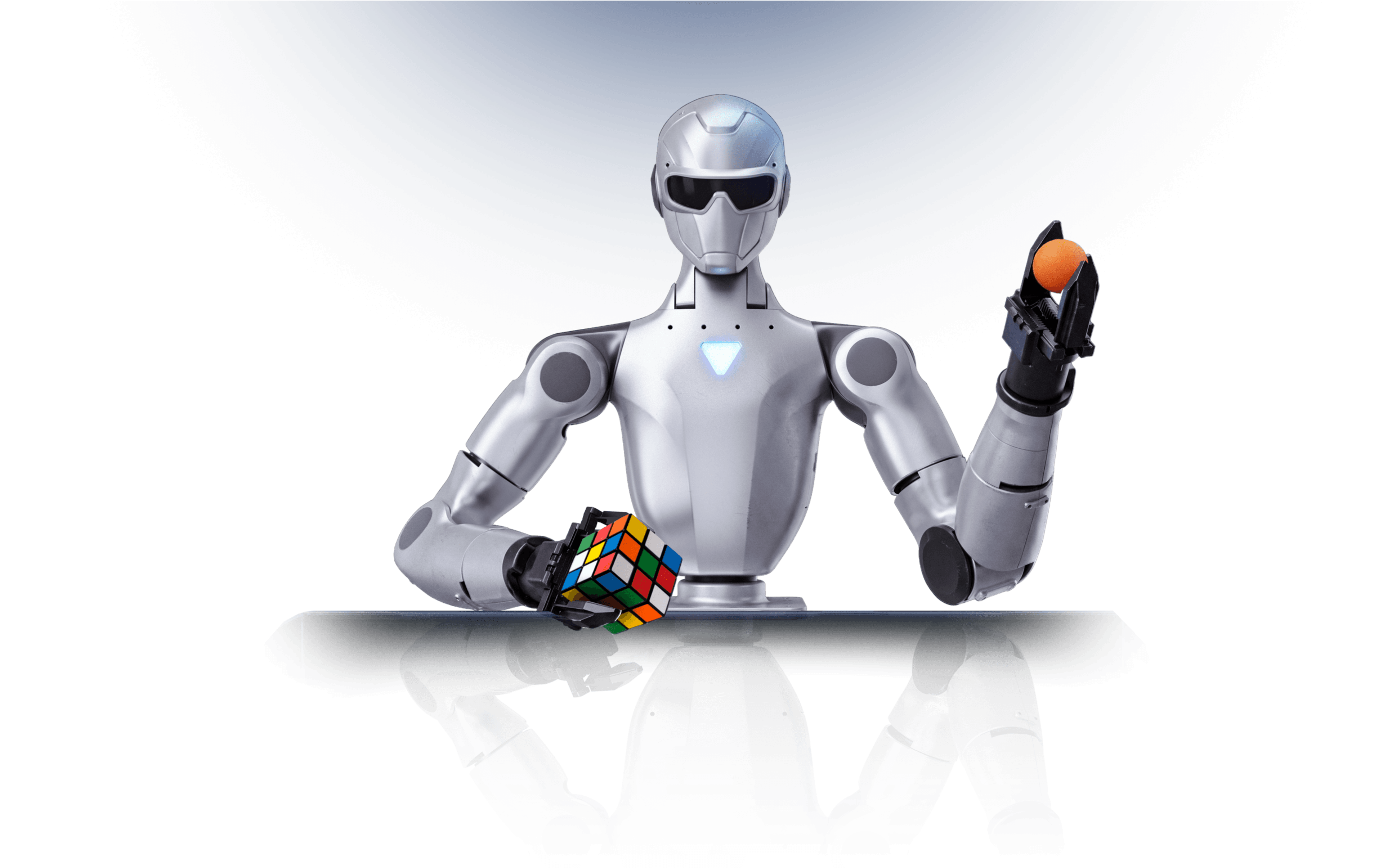
| High-performance dual-arm robot | More diverse interaction methods | Full-stack open secondary development |
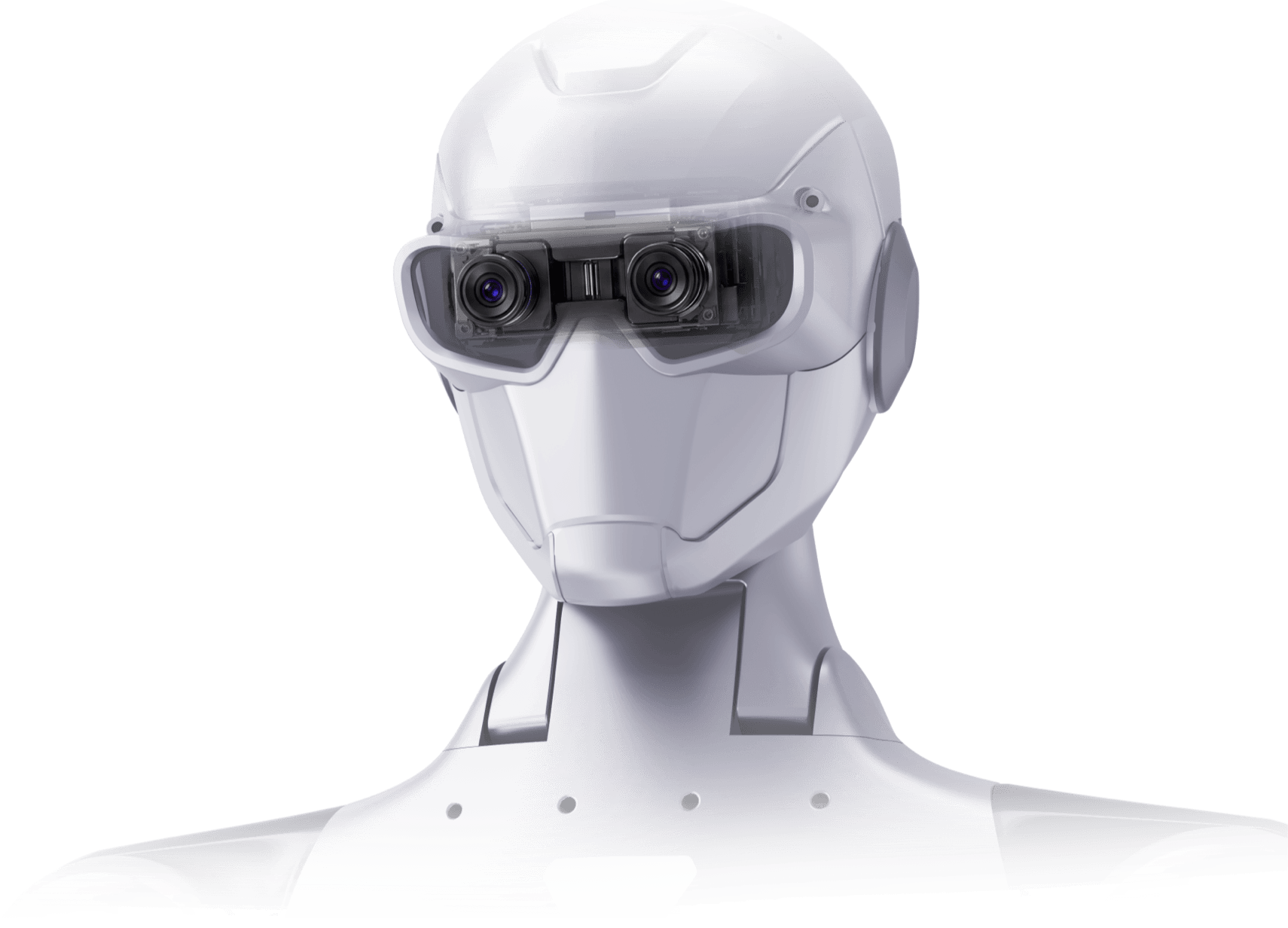
| High-performance motors, reducers, encoders and various robot sensors | Configure visual dual-camera computing modules and voice interaction system | A mature robot development framework that supports full-process secondary development at the underlying level |
A wider working space

| Lumbar joint movement space | Cervical joint movement space |
Yaw ± 150° |
Yaw ± 115°, Pitch ± 36° |
|
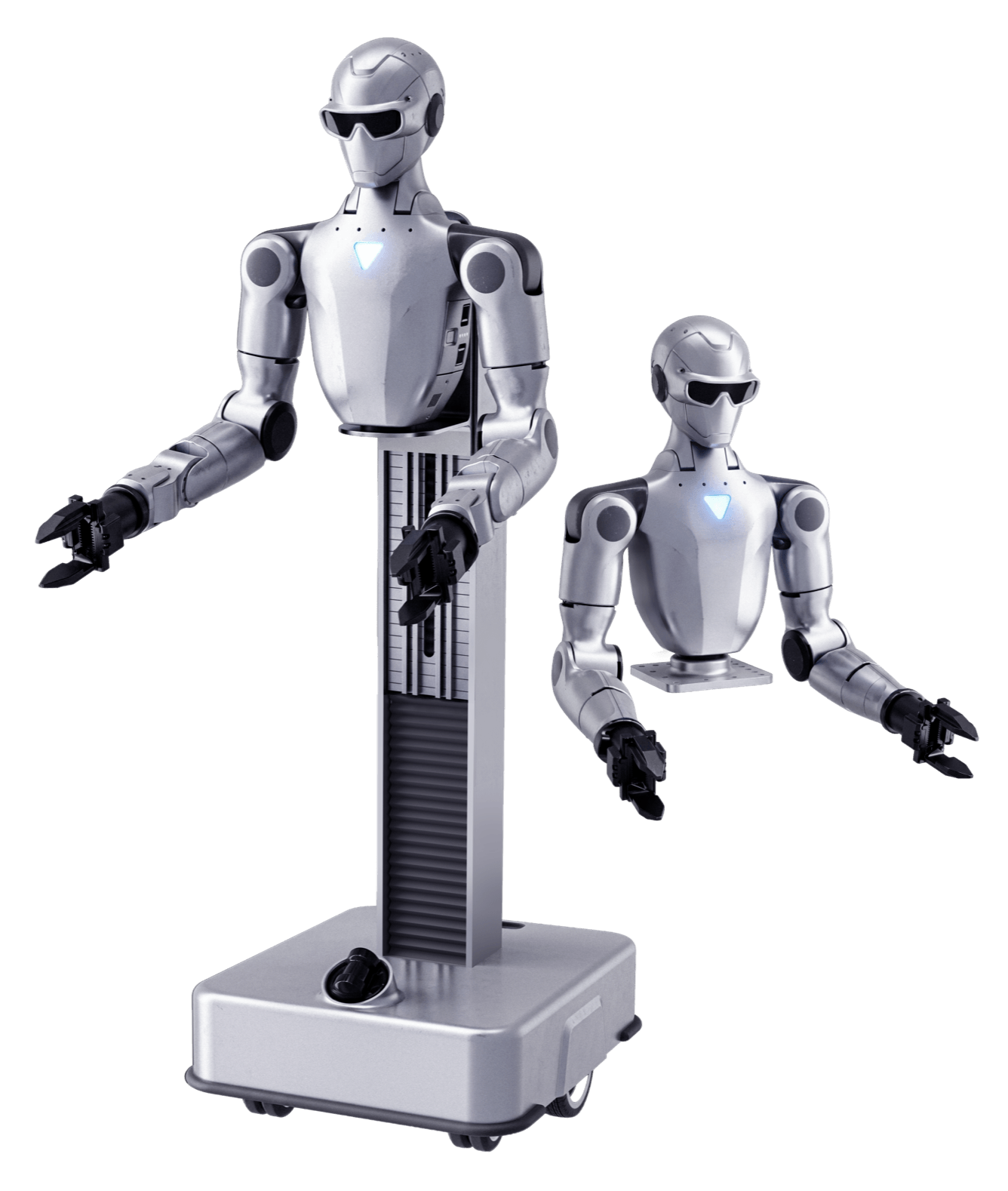
Supports two mounting types: Fixed base / Mobile base
Compatible with two robotic arms: 5-DOF / 7-DOF (single arm) |
|
|
|
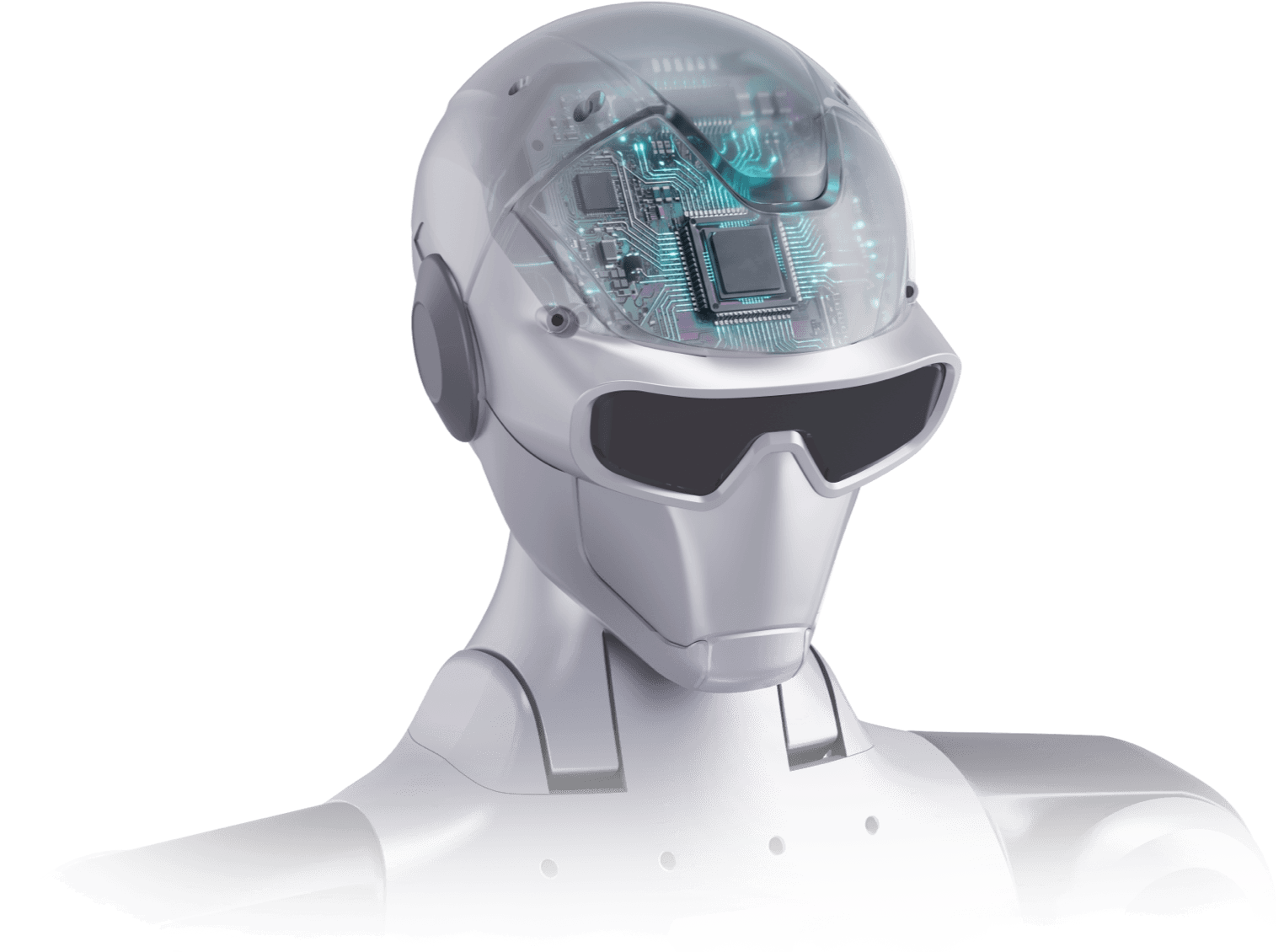
High-performance computing module,offering outstanding computing powerHead processor: 8-core high-performance CPUHead module computing power: 10 TOPSBody processor: 8-core high-performance CPU |
Provide RGB and depth map interfaces for the binocular moduleBinocular FOV: Horizontal 146°, Vertical 124°
Eye spacing: 60mm
RGB:1280×720@30Hz
544×448@10Hz
|
|
|
|
Open program interfaces and end interfacesOpen interfaces for the underlying system, robotic arm, audio, lighting, visual control, etc., supporting drag-and-drop teaching |
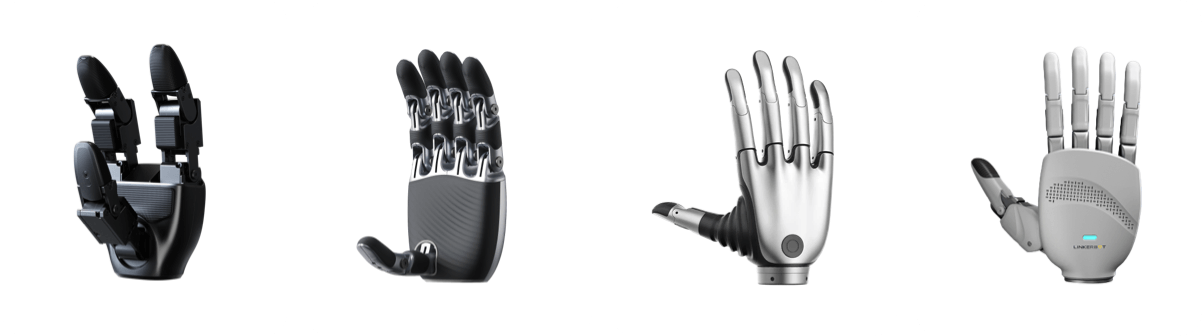
The end can be quickly equipped with different actuators
|
|
| Model | R1-A5 | R1-A7 | R1-A5-D | R1-A7-D | |
|
Mechanical Dimensions
|
Dimensions |
700x357x190mm |
835x357x190mm |
Shrunk size: 683x520x440mm Raised size: 1600x520x440mm |
Shrunk size: 683x520x440mm Raised size: 1600x520x440mm |
|
Weight |
Approx. 11kg(with external power supply) |
Approx. 13kg(with external power supply) |
Approx. 30kg |
Approx. 32kg |
|
|
Degrees of Freedom (with Gripper) |
15 |
19 |
18 |
22 |
|
|
DOF per Arm |
5 |
7 |
5 |
7 | |
|
Waist DOF |
1 |
1 |
1 |
1 | |
|
Head DOF |
2 |
2 |
2 |
2 | |
|
Chassis DOF |
/ |
/ |
3 |
3 | |
|
Joint Output Bearing |
Crossed Roller + Deep Groove Ball |
Crossed Roller + Deep Groove Ball |
Crossed Roller + Deep Groove Ball |
Crossed Roller + Deep Groove Ball | |
|
Joint Motor |
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation) |
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation) |
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation) |
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation) |
|
|
Maximum torque of the shoulder |
60Nm |
60Nm |
60Nm |
60Nm |
|
|
Max Arm Payload [1] |
2~4kg |
2~4kg |
2~4kg |
2~4kg |
|
|
End Effector [2] |
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand |
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand |
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand |
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand | |
|
Forearm + Upper Arm Length |
420mm |
555mm |
420mm |
555mm | |
|
Joint Motion Range |
Waist: Yaw±150° Head: Yaw±115° Pitch±36° |
Waist: Yaw±150° Head: Yaw±115° Pitch±36°
|
Waist: Yaw±150° Head: Yaw±115° Pitch±36°
|
Waist: Yaw±150° Head: Yaw±115° Pitch±36°
|
|
|
Electrical Characteristics
|
Wiring |
Hollow + Internal Wiring |
Hollow + Internal Wiring |
Hollow + Internal Wiring |
Hollow + Internal Wiring |
|
Joint Encoder |
Dual encoder (arm) |
Dual encoder (arm) |
Dual encoder (arm) |
Dual encoder (arm) |
|
|
Cooling System |
Local Air Cooling |
Local Air Cooling |
Local Air Cooling |
Local Air Cooling |
|
|
Power Supply |
External Power or Li-ion Battery |
External Power or Li-ion Battery |
External Power or Li-ion Battery |
External Power or Li-ion Battery |
|
|
Base Computing Power |
Body: 8-core high-performance CPU Head: 8-core high-performance CPU + 10 TOPS |
Body: 8-core high-performance CPU Head: 8-core high-performance CPU + 10 TOPS |
Body: 8-core high-performance CPU Head: 8-core high-performance CPU + 10 TOPS |
Body: 8-core high-performance CPU Head: 8-core high-performance CPU + 10 TOPS |
|
|
Microphone |
4-Array |
4-Array |
4-Array |
4-Array |
|
|
Speaker |
Dual Speakers (3W×2) |
Dual Speakers (3W×2) |
Dual Speakers (3W×2) |
Dual Speakers (3W×2) | |
|
WiFi 6 & Bluetooth 5.2 |
Yes |
Yes |
Yes |
Yes | |
|
Camera Module |
Binocular Camera + Optional Wrist Camera |
Binocular Camera + Optional Wrist Camera |
Chassis LiDAR + Binocular Camera + Optional Wrist Camera |
Chassis LiDAR + Binocular Camera + Optional Wrist Camera | |
| Accessories |
High-Computing Module |
Optional NVIDIA Jetson Orin (40-100 TOPS) |
Optional NVIDIA Jetson Orin (40-100 TOPS) |
Optional NVIDIA Jetson Orin (40-100 TOPS) |
Optional NVIDIA Jetson Orin (40-100 TOPS) |
|
Rear Power Input |
Yes |
Yes |
Yes | Yes | |
|
Charger |
Included |
Included |
Included |
Included | |
| Other |
Battery Life(Battery-powered) |
Approx. 1.5h |
Approx. 1.5h |
Approx. 1.5h |
Approx. 1.5h |
|
Smart OTA Update |
Yes |
Yes |
Yes |
Yes | |
|
Secondary Development [3] |
Yes |
Yes |
Yes |
Yes |
|
|
Warranty period [4] |
12 months |
12 months |
12 months |
12 months |
[1] The maximum load of the arm varies greatly under different arm extension postures.
[2] For end-effector selection, please contact our sales team.
[3] For more information, please read the secondary development manual.
[4] For more detailed warranty terms, please read the product warranty brochure.
[5] The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[6] The dual-arm robot features a complex structure and extremely powerful power. Users must maintain a sufficient safety distance between humans and the robot. Use with extreme caution
[7] The product appearance is subject to change. Please refer to the final product.
[8] This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
[9] Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.
Model Tree
|
R1-A-D |
R1-A5-D |
Standard |
|
|
Smart |
Dex1-1 |
||
|
Dex3-1 non tactile |
|||
|
Dex3-1 haptic |
|||
|
Revo 2 Basic |
|||
|
Revo 2 haptic |
|||
|
Linker Hand O6 non tactile |
|||
|
Linker Hand O6 haptic |
|||
|
Ligament based dexterous Hand |
|||
|
Flagship |
Dex1-1 |
||
|
Dex3-1 non tactile |
|||
|
Dex3-1 haptic |
|||
|
Revo 2 Basic |
|||
|
Revo 2 haptic |
|||
|
Linker Hand O6 non tactile |
|||
|
Linker Hand O6 haptic |
|||
|
Ligament based dexterous Hand |
|||
|
R1-A7-D |
Standard |
||
|
Smart |
Dex1-1 |
||
|
Dex3-1 non tactile |
|||
|
Dex3-1 haptic |
|||
|
Revo 2 Basic |
|||
|
Revo 2 haptic |
|||
|
Linker Hand O6 non tactile |
|||
|
Linker Hand O6 haptic |
|||
|
Ligament based dexterous Hand |
|||
| Flagship |
Dex1-1 |
||
|
Dex3-1 non tactile |
|||
|
Dex3-1 haptic |
|||
|
Revo 2 Basic |
|||
|
Revo 2 haptic |
|||
|
Linker Hand O6 non tactile |
|||
|
Linker Hand O6 haptic |
|||
|
Ligament based dexterous Hand |
|||
")
")
")